سیستم اسکادا
(نظارت کنترل و جمع آوری دادهها)
و تخمین حالت
تعداد بازدید: 5257
زمان مطالعه: 13 دقیقه

فهرست مطالب این نوشته
شبکه قدرت و اسکادا
سیستم قدرت یکی از بزرگترین سیستمهای ساخته شده به دست بشر در جهان است که از بخشهای پیچیده تولید، انتقال و توزیع تشکیل شده است. شبکه انتقال از تعداد زیادی پست تشکیل شده که از طریق خطوط انتقال و ترانسفورماتورها به یکدیگر متصل شدهاند. توان الکتریکی توسط ژنراتورها به شبکه تزریق شده و توسط بارها مصرف میشود. اگر تمام بخشهای شبکه قدرت در محدوده مجاز کاری خود باقی بمانند در این صورت گفته میشود که سیستم در حالت امن کار میکند. شبکه قدرت باید حتی بعد از یک رخداد نظیر خروج یک ژنراتور یا خط انتقال نیز در حالت امن باقی بماند. این امر نیازمند نظارت پیوسته شبکه است. پستها و نیروگاهها به پایانههای ارتباطی از راه دور (RTU) مجهزاند که انواع مختلف اندازهگیریها را جمع نموده و آنها را با استفاده از سیستم اسکادا (SCADA) به مراکز کنترل انتقال میدهند. SCADA یک سیستم خودکار صنعتی است که به عنوان هسته اصلی کنترل در بسیاری از صنایع مدرن از جمله شبکه قدرت، انرژی، غذا، کارخانهها، نفت و گاز، بازیافت، حمل و نقل، آب و فاضلاب و … استفاده میشود.
تکامل سیستمهای اسکادا
در دهه 1950 اولین کامپیوترهای کوچک برای کنترل صنایع مورد استفاده قرار گرفتند. در دهه 1960 از کامپیوترهای کوچک برای اهداف نظارت از راه دور و کنترل نظارتی استفاده گردید. اصطلاح SCADA در اوایل دهد 1970 رایج شد. در این دهه با رشد ریزپردازندهها و کنترلکنندههای منطقی برنامهپذیر (PLC) توانایی نظارت و کنترل فرآیندها نسبت به قبل بیشتر شد. در دهههای 1980 و 1990 سیستمهای SCADA به قابلیت استفاده از شبکههای محلی (LAN) که اجازه اتصال این سیستم به دیگر سیستمها را میداد به همراه تکنولوژی واسط ماشین و انسان (HMI) مجهز شدند.
سیستمهای اسکادای مدرن اجازه دسترسی زمان-واقعی به دادهها را در هر نقطه از جهان برآورده میسازند. دستیابی به اطلاعات به صورت زمان واقعی به بهرهبرداران کمک میکند تا بتوانند تصمیمهای خود مبتنی بر دادههای جمعآوری شده را بهبود دهند. بدون نرمافزار اسکادا اگر جمعآوری داده برای تصمیمگیریهای مستمر و آگاهانه غیر ممکن نباشد بسیار دشوار خواهد بود. بهعلاوه اکثر سیستمهای مدرن اسکادا دارای قابلیت توسعه سریع نرمافزاری (RAD) هستند که به کاربران اجازه میدهد برنامههای خود را به آسانی طراحی کنند حتی اگر دانش زیادی از توسعه نرمافزار نداشته باشند.
عملکرد سیستمهای اسکادا
سیستمهای اسکادا میتوانند با صرفجوئی در زمان و هزینه کنترل قدرتمند سیستم قدرت را به همراه داشته باشند. شکل (1) ساختار کلی یک سیستم SCADA را نشان میدهد که در آن کامپیوترهای مرکز کنترل اطلاعات را از طریق RTUها و به کمک شبکههای مخابراتی مانند ماکروویو، خط تلفن، فیبر نوری و ماهواره دریافت میکنند. البته بهطور کلی نوع بستر مخابراتی مورد استفاده، هدف این مطالعه نبوده و فقط پیامدهایی که در اثر بروز اتفاق در این بسترها به وجود میآیند مدنظر هستند.
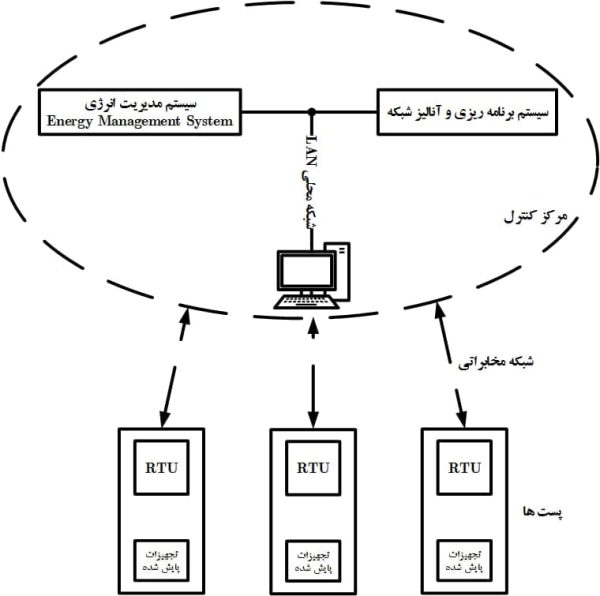
اطلاعات در شبکه قدرت میتوانند آنالوگ باشند مانند جریان، ولتاژ و درجه حرارت و یا بصورت دیجیتال باشند. از جمله اطلاعات دیجیتالی میتوان به وضعیت کلیدهای قدرت و کنتاکتورها اشاره نمود. همچنین میتوان به کمک سیستم SCADA تعدادی از پارامترهای اندازهگیری نشده مانند توانهای اکتیو و راکتیو را نیز محاسبه نمود. پس از جمعآوری دادهها میتوان آنها را به نرمافزارهای موجود در سیستم SCADA منتقل نموده و با تحلیل مناسب، ماشینها و تجهیزات از جمله شیرها، پمپها، موتورها و نقاط تنظیم Governorها و AVRها را کنترل نمود.
مشکلات سیستم SCADA
اندازهگیری به کمک سنسورها انجام میشود و سپس مقادیر اندازهگیری شده که اغلب آنالوگ هستند به کمک ترانسدیوسرها و مبدلهای آنالوگ به دیجیتال (ADC) به دیجیتال تبدیل میشوند. عملیات تبدیل از آنالوگ به دیجیتال در RTUها انجام میگیرد. زمانیکه مقادیر اندازهگیری آنالوگ به دیجیتال تبدیل میشوند به دلیل وجود خطا در تبدیل آنالوگ به دیجیتال، دادهها دچار خطا شده و مقادیر نشانداده شده در مراکز کنترل SCADA وضعیت صحیحی را از سیستم نشان نخواهند داد. این خطا را خطای ذاتی RTUها مینامیم.
بهعلاوه ممکن است مقادیر نشان داده شده در مراکز کنترل به دلیل تأخیرهای ممکن مربوط به یک زمان واحد نباشند. استفاده از برچسب زمانی میتواند بک راهحل ممکن باشد، اما این راه به سنکرونسازی RTUها نیازمند است که تنها به کمک سیستم موقعیتیاب جهانی (GPS) امکانپذیر است.
شکل (2) این مورد را نشان میدهد که در آن تأخیر دادهها باعث میشود که اندازهگیریها با تأخیرهای زمانی که برای تمام سیگنالها یکسان نیست به ایستگاه کنترل مرکزی برسند.
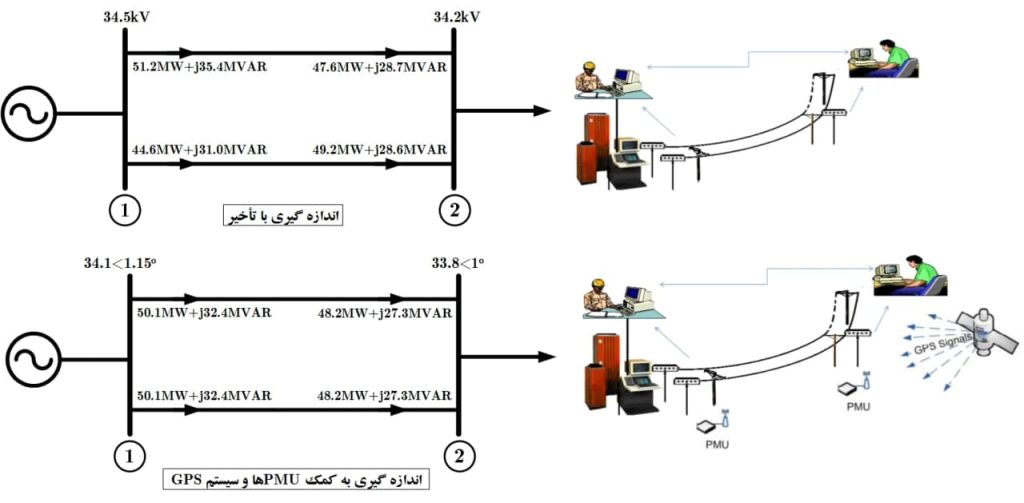
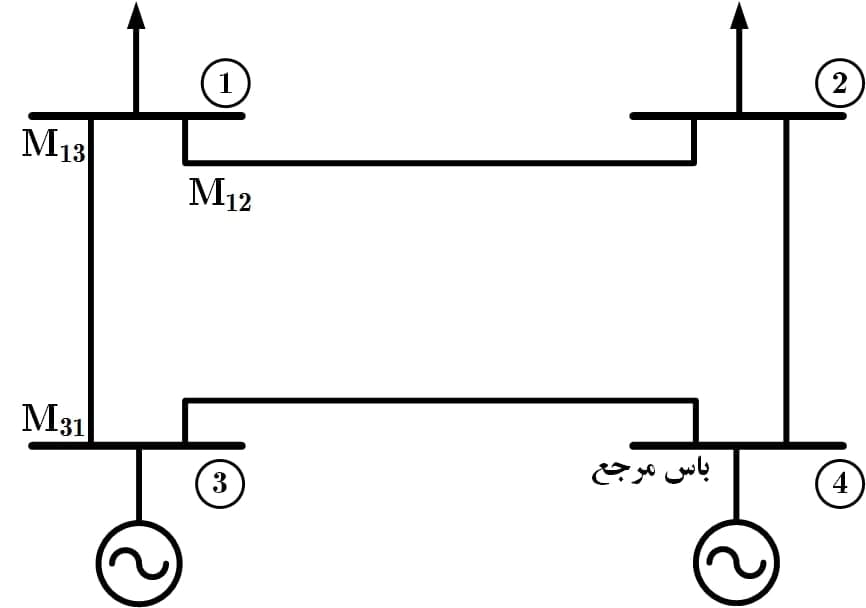
مشکل دیگری که ممکن است وجود داشته باشد آن است که تمامی مقادیر مورد نیاز برای پایش و نظارت شبکه اندازهگیری نشده باشند. برای نمونه میتوان در نظر گرفت که در شبکه شکل (2)، داده مربوط به توان انتهایی خط پایین بین باسهای یک و دو اندازهگیری نشده است. این کمبود اطلاعات میتواند منجر به عدم مشاهدهپذیری سیستم نیز گردد. برای مثال میتوان نشان داد که شبکه چهار ماشینه شکل (3) با وجود سه دستگاه اندازهگیری و به دلیل کمبود اطلاعات مشاهدهپذیر نیست.
راه حل غلبه بر اکثر این مشکلات استفاده از ابزار تخمین حالت و به کارگیری آن برای شبکه قدرت است.
تخمین حالت شبکه قدرت
در زمان عملیات لحظه به لحظه شبکه قدرت، بارها به صورت پیوسته تغییر میکنند و بنابراین میزان تولید ژنراتورها، ولتاژ باسها و توان عبوری از خطوط تغییر مییابند. درصورتیکه مقادیر دامنه ولتاژ و زوایا در هریک از باسهای شبکه قدرت مشخص باشند با ضرب ماتریس ادمیتانس شبکه در ماتریس ولتاژ باسها به آسانی میتوان جریانهای تزریقی به باسبارها را محاسبه نمود:
$${I_{bus}} = {Y_{bus}} \times {V_{bus}}$$
با داشتن جریانهای تزریقی میتوان توان تزریقی در هر باس شبکه را محاسبه کرد:
$$\begin{array}{l}
{P_{bus}} = {\mathop{\rm Re}\nolimits} \left[ {V_{bus}^* \times {I_{bus}}} \right]\\
{Q_{bus}} = - {\mathop{\rm Im}\nolimits} \left[ {V_{bus}^* \times {I_{bus}}} \right]
\end{array}$$
با داشتن توانهای تزریقی در باسبارها نیز می توان به راحتی پخشبار شبکه را محاسبه نموده و وضعیت شبکه را به طور کامل تعیین کرد. بنابراین با دانستن ولتاژ باسها میتوان تمامی متغیرهای شبکه قدرت را دانست. البته مشکلاتی در راه اندازهگیری ولتاژ در شبکه قدرت وجود دارد؛ ازجمله اینکه:
- در مواردیکه PMUها در دسترس نیستند زوایای ولتاژ باسها را نمیتوان اندازهگیری نمود.
- نمیتوان به تمامی نقاط سیستم دسترسی داشت.
بنابراین میتوان به جای ولتاژ، توانهای عبوری از خطوط یا دامنه جریانهای عبوری از خطوط را اندازهگیری نمود. البته هنوز این مشکل وجود دارد که خطاهای اندازهگیری به دلیل تأخیرهای زمانی نابرابر در جمعآوری دادهها یا خطاهای ذاتی RTUها و یا نویزهای اندازهگیری وجود داشته باشد. با در نظرگیری این حقایق میتوان فهمید که اندازهگیری دقیق و بدون خطای ولتاژها به صورت مستقیم کار سادهای نبوده و به منظور یافتن وضعیت شبکه قدرت نیاز به یک روش محاسبه خاص است. این روش تخمین حالت نامیده میشود.
آینده سیستمهای اسکادا
در حال حاضر برخی از ابزارهای استاتیکی که از دادههای سیستم اسکادا برای مطالعه استفاده میکنند عبارتند از:
- پایگاههای داده زمان واقعی
- پایگاههای داده تاریخی
- برنامههای مدیریت انرژی مانند تخمین حالت، پخش بار بهینه، ارزیابی پایداری ولتاژ
- سیستمهای اطلاعات جغرافیایی شامل مدیریت شبکه توزیع.
علیرغم تمامی تلاشهای انجام شده برای بهبود حفاظت و امنیت شبکه قدرت به کمک این ابزارها، مشکلات فراوانی به علت عملکرد اشتباه یا هماهنگی اشتباه ادوات حفاظتی و عدم عملکرد بهینه سیستم قدرت مشاهده میشود. برخی از خطاهای پنهان سیستم نیز زمانی مشخص میشوند که حادثهای در شبکه رخ میدهد که انتظار آن وجود ندارد یا سیستمی برای آن طراحی نشده است. با توجه به این توضیحات آنچه که برای جلوگیری از مشکلات فنی و کاهش درآمد از دست رفته در هر لحظه از زمان نیاز داریم ابزارهای دینامیک است که به کمک آنها بتوان عملکرد واقعی سیستم تحت کنترل را پردازش نمود. بنابراین پیشبینی میشود که آینده سیستم SCADA به صورت زیر خواهد بود:
- بر اساس اندازهگیریهای زمانواقعی از شبکه باشد.
- از مدل دقیقی که نشان دهنده دینامیک واقعی سیستم باشد استفاده کند.
- اندازهگیریهای آن دارای دقت بالایی باشند (مثلاً 25 اندازهگیری در هر ثانیه)
- مطالعات آفلاین و سناریوهای فرضیهای در آن کمتر باشد.
- اندازهگیریهای آن دارای یک مرجع زمانی یکسان باشند که این مسأله دقت و قابلیت اعتماد سیستم را افزایش میدهد.
- به کمک برنامههای کاربردی پیشرفته فرآیند خودترمیمی در آن امکان پذیر باشد.
برای داشتن سیستم اسکادایی با یک چنین ویژگیهایی به خصوصیات شبیهسازی خاصی از جمله شبیهسازی زمانواقعی نیاز است. شبیهسازی زمان واقعی یعنی اینکه بتوان به صورت به لحظه و با کمک دادههای شبکه مطالعات مختلف را انجام داد. مثلاً عملکرد رلهها را در اثر وقوع یک خطا بررسی نموده و یا توان مکانیکی یک موتور را افزایش یا کاهش داد و تأثیر آن را در همان زمان در شبکه مورد بررسی دید. این موضوع کنترل شبکه را سادهتر نموده و درک عملیات کنترل شبکه را نیز سادهتر مینماید. علاوه بر این در این سیستم اسکادا به شبیهسازی آنلاین نیز نیاز خواهد بود. بدین معنی که در این سیستم باید بتوان یک واحد صنعتی را به نرمافزار شبیهسازی متصل نموده و کامپیوتر شبیهساز با مطالعات خود وضعیت دقیق بهرهبرداری شبکه را مشخص کند. تمام این مطالعات دینامیکی فقط در صورتی امکان پذیر است که حالت شبکه قدرت به طور کامل و دقیق در هر لحظه زمانی دلخواه مشخص باشد. این موضوع اهمیت مسأله تخمین حالت دینامیک شبکه را به خوبی مشخص میسازد، به گونهای که بتوان یک برآورد واقعی از حالت سیستم داشت.
مروری بر روشهای تخمین حالت شبکه قدرت
تخمین حالت دینامیک را میتوان به معنی توانایی دنبال نمودن دینامیک سیستم تعریف نمود که نقش مهمی در کنترل و حفاظت شبکه قدرت دارد. با گسترش به کارگیری واحدهای اندازهگیری فازور (PMU) و همچنین زیرساختهای مخابراتی پیشرفته میتوان به ابزار تخمین حالت سریع و قابل اطمینان دست یافت. اکثر ابزارهای کنترل و نظارت در مراکز مدیریت شبکه بر اساس حالت ماندگار سیستم هستند و لذا نمیتوانند دینامیک سیستم را دنبال نمایند. این محدودیت به این دلیل است که ابزارهای این مراکز از سیستمهای اسکادا استفاده میکنند که سرعت اسکن پائینی داشته و برچسب زمانی ندارند. به این دلیل تخمین حالت در مراکز کنترل امروزی در قالب چند ثانیه تا چند دقیقه انجام میشود. با بکارگیری تخمین حالت دینامیک، کنترل و نظارت و حفاظت شبکه ممکن خواهد بود.
این پست دارای 4 نظر است
مهندس پیروز باشید بسیار مفید بود
ممنون از شما دوست عزیز
موفق باشید.
عالی ،برقرار باشید
موفق باشید.